Anime Pose + Camera Solidifier











Details
Download Files (1)
About this version
Model description
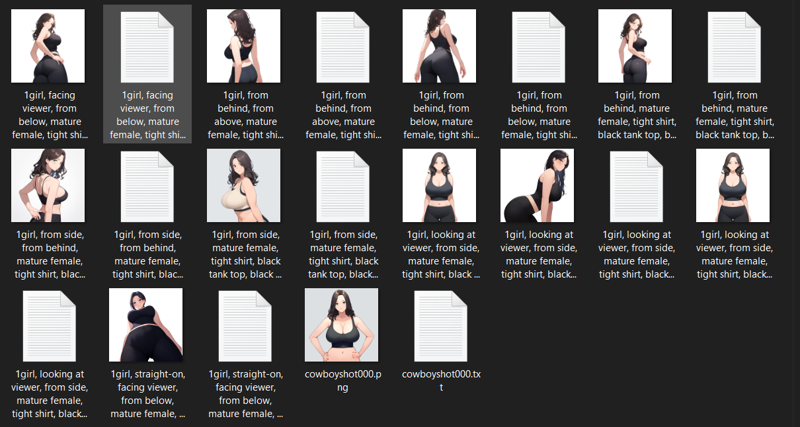
This is a simple 1k image lora trained with the original AI Generated Simulacrum dataset.
These images were partially released on one of the older loras.
They consist almost entirely of doll parts and fragments of body parts; each specifically hand crafted for camera angles, simple coloration, flat style, and very simple tagging.
They were created to fix PDXL Autism; and they are well suited to fix the bulk training in Simulacrum V4 Epsilon; primarily due to civit allowing epsilon trainings.
TURN THE POWER DOWN, to enable the SDXL - SIMV4 hands to cut through. Those hands are quite good, but the hands in this dataset are not.
Combine angle tags like;
from side, from behind, side view;
This produces an image where the upper body is viewed from the side, the lower body is twisted to be a bit behind, and the view of the camera is fixated on the side.
 Now, it's not perfect, but there's a lot of potentials there.
Now, it's not perfect, but there's a lot of potentials there.
You try generating and hand tagging thousands of images yourself. It's a pain in the ass.
Don't let the tags fool you. Everything is based on angles, the tags are actually meant to break down Autism's training originally.
SimV4 is capable of anything, so you can simply say safe and boom. They're dolls, they aren't anatomically correct. Their hands are wrong and they are ineffective at full high-fidelity art. However, they provide absolutes in terms of controllers.
Each pose was specifically angled and styled around those angles, so the training will deal some pretty hefty damage to SimV4 when it comes to pose control.

These empty model dolls are the foundation of the original Simulacrum's finetune final stage; but teaching it to the model in it's early learning cycles wasn't such a good idea.
That's why I ended up switching to the Controlnet dolls, but that's another story.
This is a lora trained overnight specifically on the original images. This should allow for many of them to cut through.
In a couple days I'll likely train the full SimV4 base dataset; which is about 2.5k images specifically devoted to pose control and camera; so it's not going to be THAT different. It'll just do better with realistic and 3d, this one does okay with 3d but you'll get cross-contamination from earlier data that I simply haven't removed from the dataset because it's a painful process filtering and I simply don't have time in my day.