POV Doggy

詳細
ファイルをダウンロード (1)
モデル説明
Doggystyle POV
Fresh from a break, first epoch I test and... voila!
Versions
WAN2.2
Minor caption updates, identical set to One.WAN. Native 2.2 is cleaner...
POV doggystyle sex, The beautiful {Russian|French|Swedish|Swiss|Austrian|Dutch|English|America|Californian|Siberian} woman with very long {blonde|bright blonde|brown|dirty blonde} hair is fucked by a{a African|a Asian| Latin} man from behind, She is naked {except for a {blue|red|black|white} {bra|shirt}|}.They are on a {white|red|blue|yellow|orange|multicolor|purple|teal|black} {bed|ottoman|couch}. Her face, expressing (sexual pleasure|surprise|pain|love|), it turned away and to the side.
Lighting is {bright and even|soft}, view from above
One.WAN
Another opportunity to make some WAN training mistakes, launched it before bed and woke up to see it taking 170 seconds per step XP. Fixed the bucket and then got through 40 epochs in a few hours, resulting in this!
Added two new clips I had, tightened captions but all in all this was a breeze as my process matures and my workflow is finally suitable for my lack of patience :P
One
Pre-vacay I’d already collected 8 clips of this. I quickly captioned it, tailored the buckets to match and trained. I extracted 5 epochs to test, started with epoch 90. It hit and hit and hit some more, with nothing more than the usual bad render here and there. Not sure I’m even going to test the other checkpoints I set aside since this one seems to be working super well.
Let me know if you disagree and why!
Wildcard Prompt
POV doggystyle sex seen from aboveThe beautiful {Russian|French|Swedish|Swiss|Austrian|Dutch|English|America|Californian|Siberian} woman with very long {blonde|brown|dirty blonde} hair is bent forward while the {African|Asian|Latin} man is thrusting into her vagina from behind.
She is naked except for a {blue|red|black|white} {bra|shirt} exposing her {big|round|tight} ass.
They are on a {white|red|blue|yellow|orange|multicolor|purple|teal|black} {bed|ottoman|couch}.
Lighting is {bright and even|soft}.
Training Notes (HYV)
How I select epochs
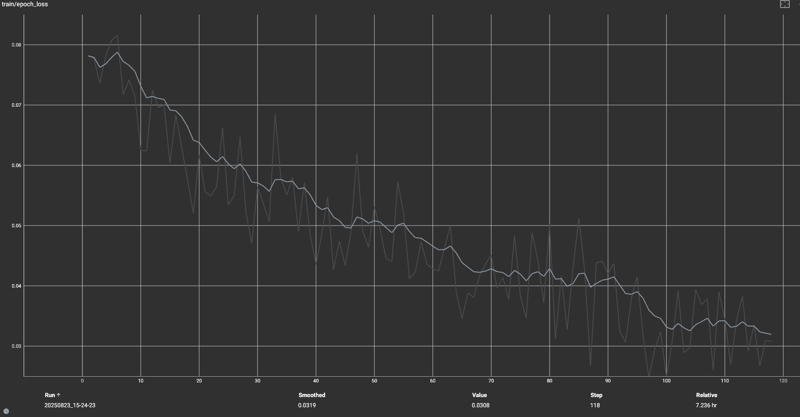 Above is the epoch loss curve in Tensorboard. It’s taken me a long time to start ‘seeing’ these properly, the trends, the plateaus, the squiggles…
Above is the epoch loss curve in Tensorboard. It’s taken me a long time to start ‘seeing’ these properly, the trends, the plateaus, the squiggles…
Note epoch 90, which is at the tail end of a plateau (flattening). I’ve trained more than 20 LORAs and the sweet spot is almost always somewhere between 0.03 and 0.05 loss. The loss does decrease to closer to 0.02, but that’s where I find generalization suffers and overfitting rears it’s ugly head!
My training runs always start bumpy for ~10 epochs, decrease steadily for another 20% of the run, plateau a bit for ~10%, then decrease again for another 20-30% of the run. This plateau, before the last drop towards 0.02 is typically where I’ve found good results in terms of stability and generalization.
For this run I also extracted epochs 65, 75, 95 and 100, but 90 was my first choice because it appeared just before the drop to overfitting (or so I assumed). I still haven’t tested the other checkpoints, but again, 90 works so well, why bother?!
Disclaimer
Resper rendsponsibly.