Tiny Planets (360° Drone Panorama)















详情
下载文件 (1)
模型描述
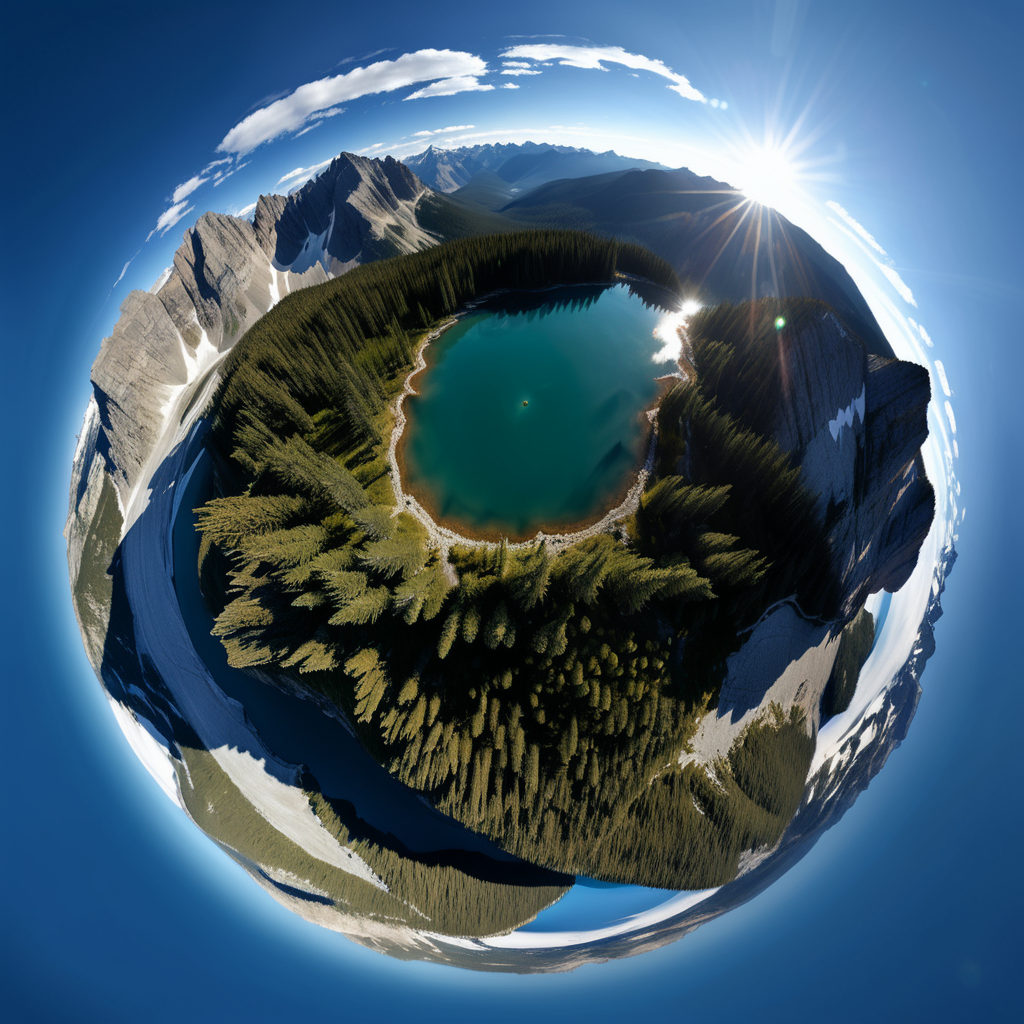
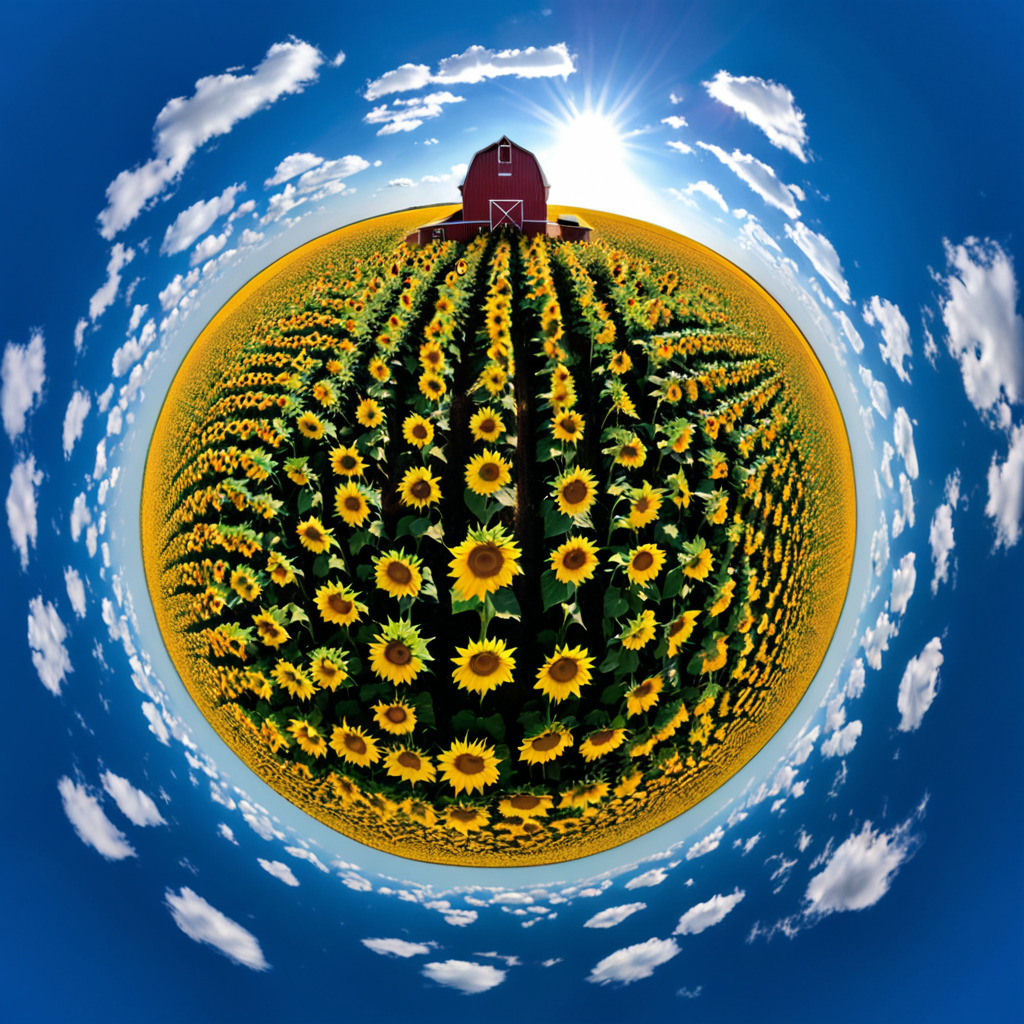
Tiny Planets are 360° aerial panoramas with stereographic projection.
This LoRA was trained on a small dataset containing a mix of my own drone photography and CC0 shots from Unsplash, captioned carefully with GPT-4o vision and reviewed.
Trained on RobMix Zenith, not tested with other checkpoints.
Recommended Settings
Checkpoint: RobMix Zenith
Resolution: 1024x1024
Ideal LoRA Strength: 0.3 to 0.7
Max LoRA Strength: up to 1.5
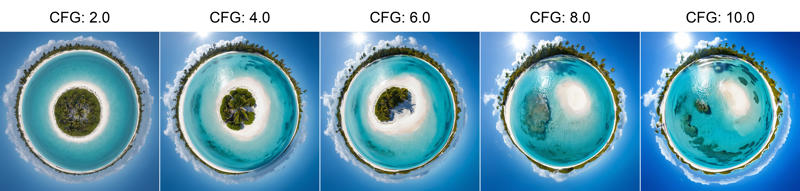
CFG: 4 to 10 (see note)
Sampler: Euler
Scheduler: AlignYourSteps
Steps: 30
If you're using ComfyUI to adjust model and CLIP strengths separately, I find lowering CLIP strength (as low as 0) tends to produce images with fewer artifacts. YMMV.
Because Tiny Planets are spherical and this LoRA was trained entirely on square images, recommended aspect ratio is 1:1.
Prompting
The model was trained on captions with a consistent template and high descriptive detail to help isolate style and make the model flexible enough to adapt to scenery and details outside of its training data. This worked out better than I had expected, and the model handles novel concepts well.
The details, in order of importance, are: Setting + Sky + Details + Tone.
A tiny planet of New York City. The sky is overcast with patches of blue peeking through. The cityscape below features the Empire State Building prominently among a mix of modern and historical buildings. The overall lighting is soft and diffused, suggesting it might be late afternoon.A tiny planet of a quaint village in Tuscany, Italy. The sky is a soft blue with a few clouds. The landscape below features rolling hills, vineyards, and stone houses. The sun is low in the sky, casting a golden light across the scene.You don't need all of the details. "A tiny planet of [subject]" will do.
Model Optimizations
The typical model optimizations I recommend on my model page still apply, except Automatic CFG. CFG has a pretty significant impact on the results with this LoRA and dialing it in manually is part of the aesthetic.
Also note that I'm using a first order solver (Euler) for stability, as the random noise injected with higher order solvers tends to have a negative impact on image quality. New ODE solvers may be good here, albeit slow.
LoRA Strength
At low LoRA strengths (~0.3), the model may produce a drone shot with a strong fisheye effect, but without a Tiny Planet effect. This is especially true with generic landscapes without a clear focal point. These shots are still cool, so experiment.
High LoRA strengths (>0.7) tend to push the details of your prompt from the middle of the Tiny Planet toward the horizon.
To emphasize the content of your prompt, set the LoRA strength as low as you can while still producing the effect. This will vary from shot to shot based on the subject. To produce an image most consistent with the Tiny Planet style, increase LoRA strength.

CFG
This LoRA tolerates high CFGs very well, and in fact tends to perform well with higher than typical CFGs. Lower CFGs will produce images with less detail, more order, and less contrast/saturation. Higher CFGs provide more dynamic compositions, improved tone, and can yield more visually interesting results.