ComfyStereo - ComfyUI Stereoscopic nodes

详情
下载文件 (1)
关于此版本
模型描述
ComfyStereo
From: https://github.com/Dobidop/ComfyStereo feel free to post feedback and to provide help
Introduction
- Stereo Image Node – A port of the Automatic1111 stereo script with added features like edge-aware and direction-aware blurring of the depth map. Left-right, cross-eyed, and anaglyph modes are available in the node.
- DeoVR View Node – A node for launching and viewing images and videos in DeoVR.
DeoVR View Node Setup
In DeoVR, set "Enable remote control" to true in the developer settings.
To launch DeoVR from this node, you must configure the path to DeoVR.exe in the configuration file:
ComfyUI\custom_nodes\comfystereo\config.jsonDefault Path:
"C:\\Program Files (x86)\\Steam\\steamapps\\common\\DeoVR Video Player\\DeoVR.exe"Important Notes:
- You must already have an image or video open in DeoVR before this node can change what is displayed in the headset.
- If DeoVR is on its main menu screen, this will not work.
- The launcher skips the main menu screen automatically, but if you manually start DeoVR, you need to open an image/video before using this node.
---
New Features & Depth Map Blurring
New functionality includes edge-aware and direction-aware blurring of the depth map, additional interpolation methods, and stereo distortion improvements.
Depth map blurring:
- Reduces artifacts and harsh transitions in the final stereo image, especially at higher divergence settings.
- Trade-off: It increases computation time (5-25%). If speed is a concern, you may want to disable it.
- depth_map_threshhold sets the depth map gradient sharpness application cutoff. Low values will apply the blur to more shallow gradients, blurring the depth map more broadly (which can negativbely affect the end result). Higher values isolates the steeper gradients.
How to Enable Adaptive Blurring
- Set 'depth_map_blur' = True.
Mask Output Considerations
- The mask output is imperfect and is mainly useful for the "No Fill" and "Imperfect Fill" options. This outputs a black and white image of the areas which were not filled in.
---
Stereo Image Generation Methods
Key Parameters
Separation (`separation`)
- Defines an additional horizontal shift percentage applied to the left and right images.
- Modifies the distance between the stereo pair, affecting alignment.
Divergence (`divergence`)
- Controls the strength of the 3D effect (in percentage terms).
- A higher divergence increases depth perception, while a lower value creates a flatter effect.
Stereo Balance (`stereo_balance`)
- Determines how divergence is distributed between the two eyes.
- 0.0 = Even distribution
- Positive/negative values shift the effect toward one eye.
Stereo Offset Exponent (`stereo_offset_exponent`)
- Adjusts depth-to-offset mapping, influencing how depth values are converted into horizontal shifts.
---
Infill Methods
Some fill methods are faster, while others preserve structure better.
- Naive methods are slightly quicker.
- Polylines Soft is often the best general filler.
Comparison of Infill Techniques
No Fill Shifts pixels based on depth without filling gaps.
No Fill - Reverse Projection Works backward to assign pixel values but leaves gaps.
Imperfect Fill - Hybrid Edge Mixes "Polylines" and "Reverse Projection" for better structure.
Fill - Naive Fills gaps using nearest pixels (causes stretching).
Fill - Naive Interpolating Uses interpolation to smooth gaps.
Fill - Polylines Soft Uses polylines with soft edges to maintain structure.
Fill - Polylines Sharp Similar to "Soft" but with sharper transitions.
Fill - Post-Fill "No fill" + edge-aware interpolation.
Fill - Reverse Projection + Post-Fill "Reverse Projection" + directional interpolation.
Fill - Hybrid Edge with Fil lEnhanced "Hybrid Edge" with adaptive smoothing.
---
Installation
Easy Method (Recommended)
Use ComfyUI-Manager for quick installation.
Manual Installation
Clone the repository and place it in ComfyUI's custom_nodes directory:
git clone https://github.com/Dobidop/ComfyStereo.git
pip install -r requirements.txt---
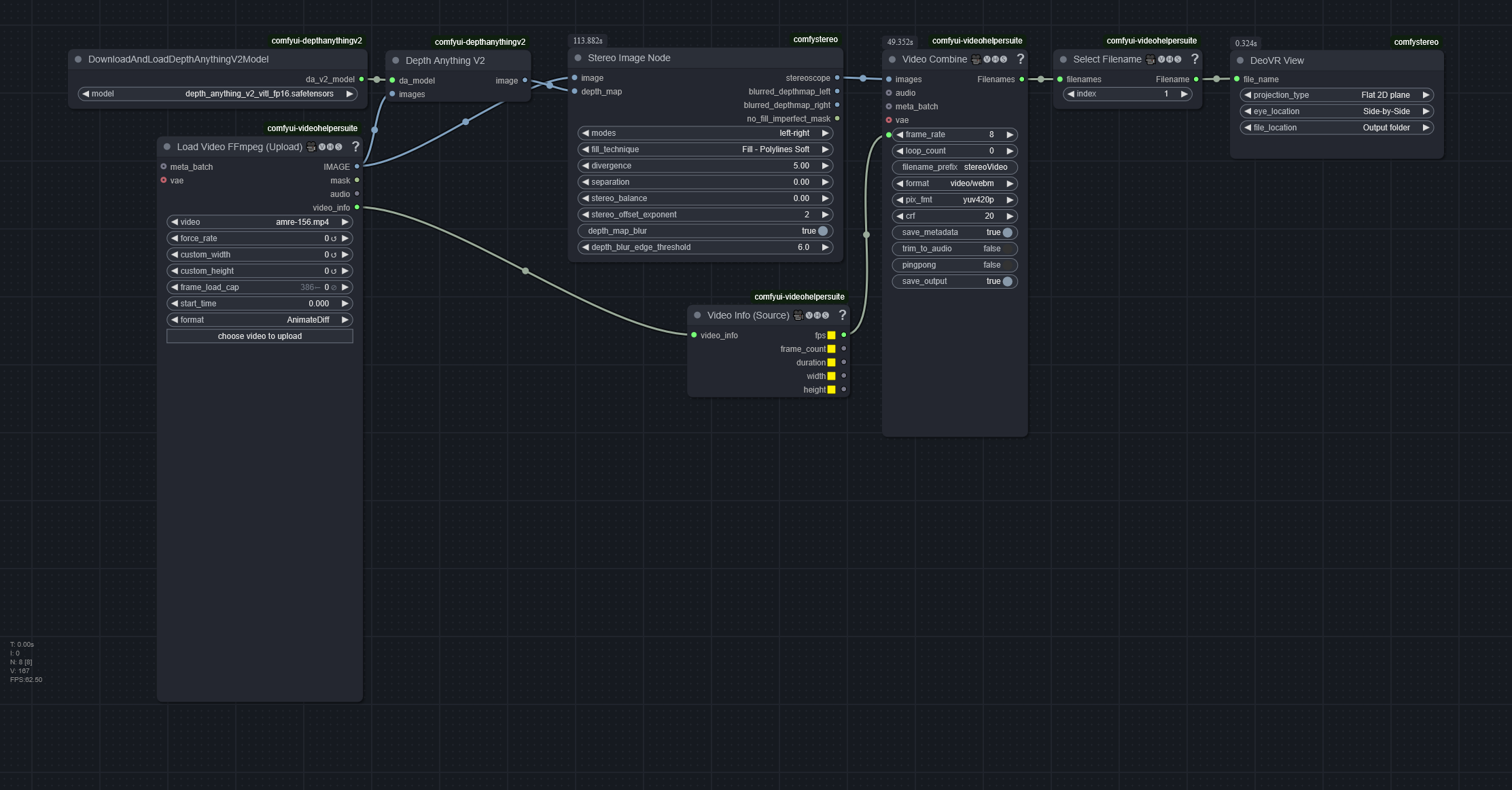
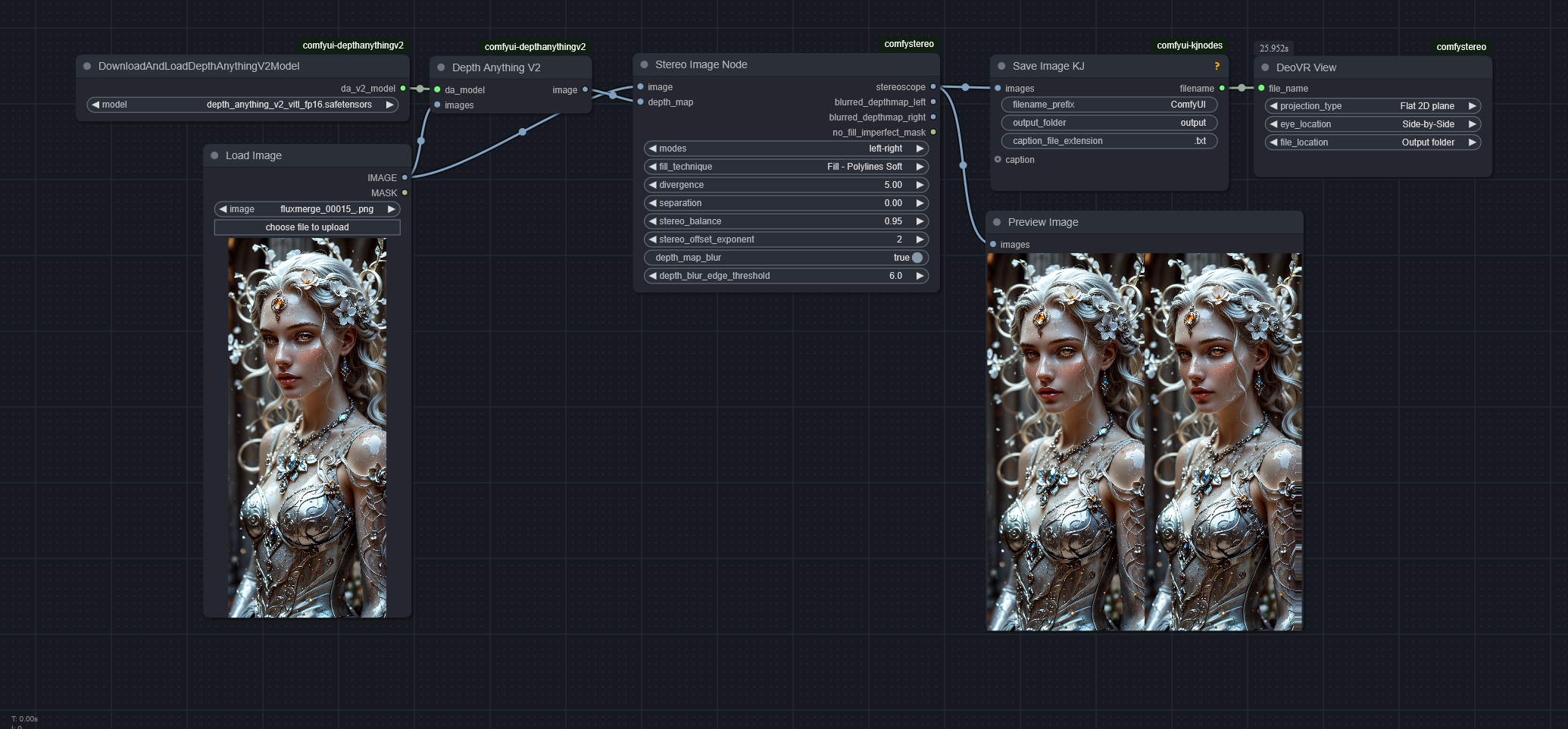
Example Workflow
Image workflow
Video workflow
https://github.com/user-attachments/assets/0a61bc30-1821-40b8-b90d-12733f85bdea)
---
Troubleshooting
- Low CPU utilization?
- Try updating Python and ComfyUI-Manager—this fixed the issue for one user.