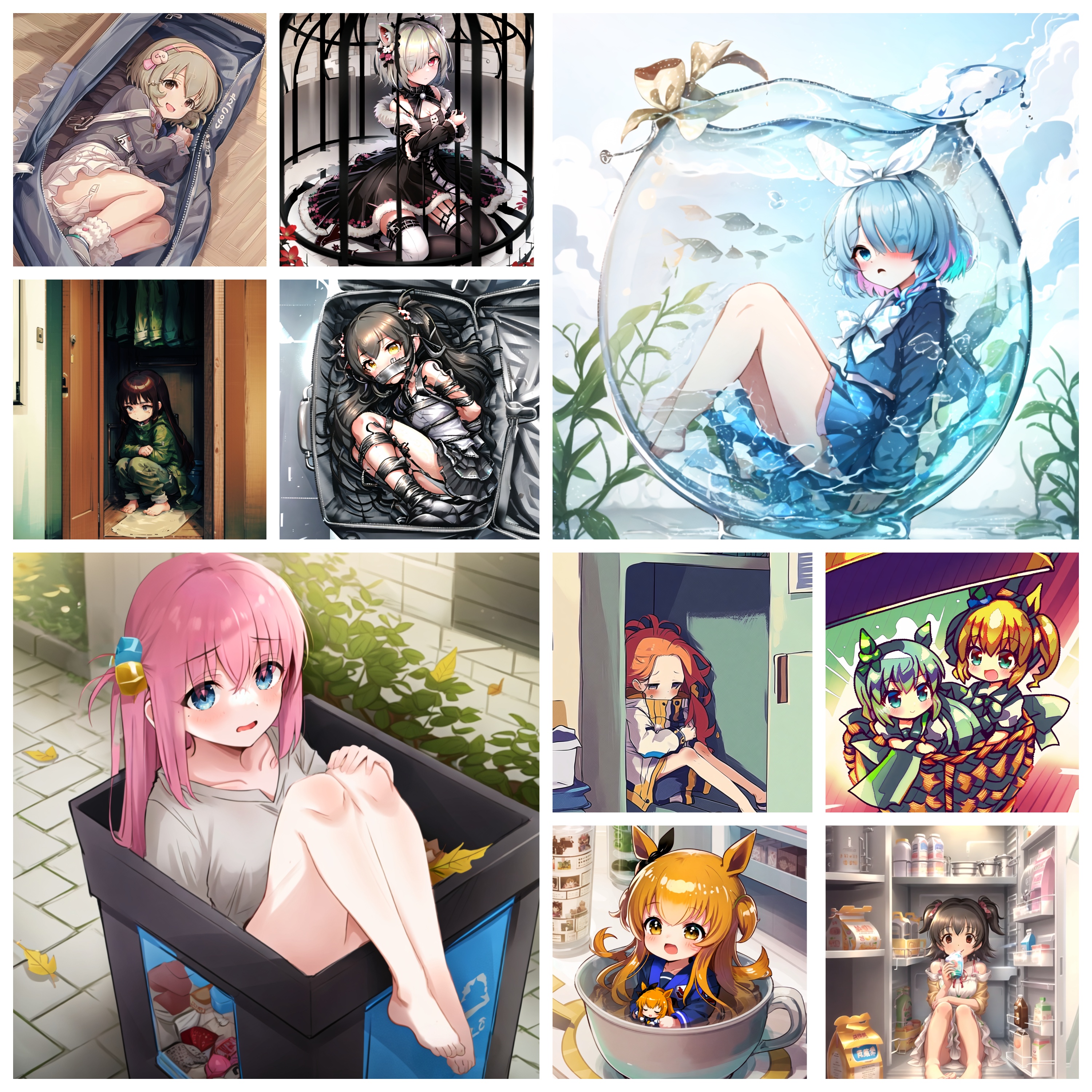
In container: in box / in bottle / in fishbowl / in trash can / in suitcase / in bag / in locker ...
















详情
下载文件 (1)
模型描述
The goal of this LoHa (simply called lora below) is to improve the "in container" concept ingeneral
---
The image of 'in trunk' and 'in suitcase' get removed for some reason (maybe I should mark my post as mature?)
Therefore I decided to instead put the images here for those who are interested: in trunk, in suitcase
---
As expected, concept lora is much more difficult to made and is more fragile to model switch
{kind=link}
{kind=link}
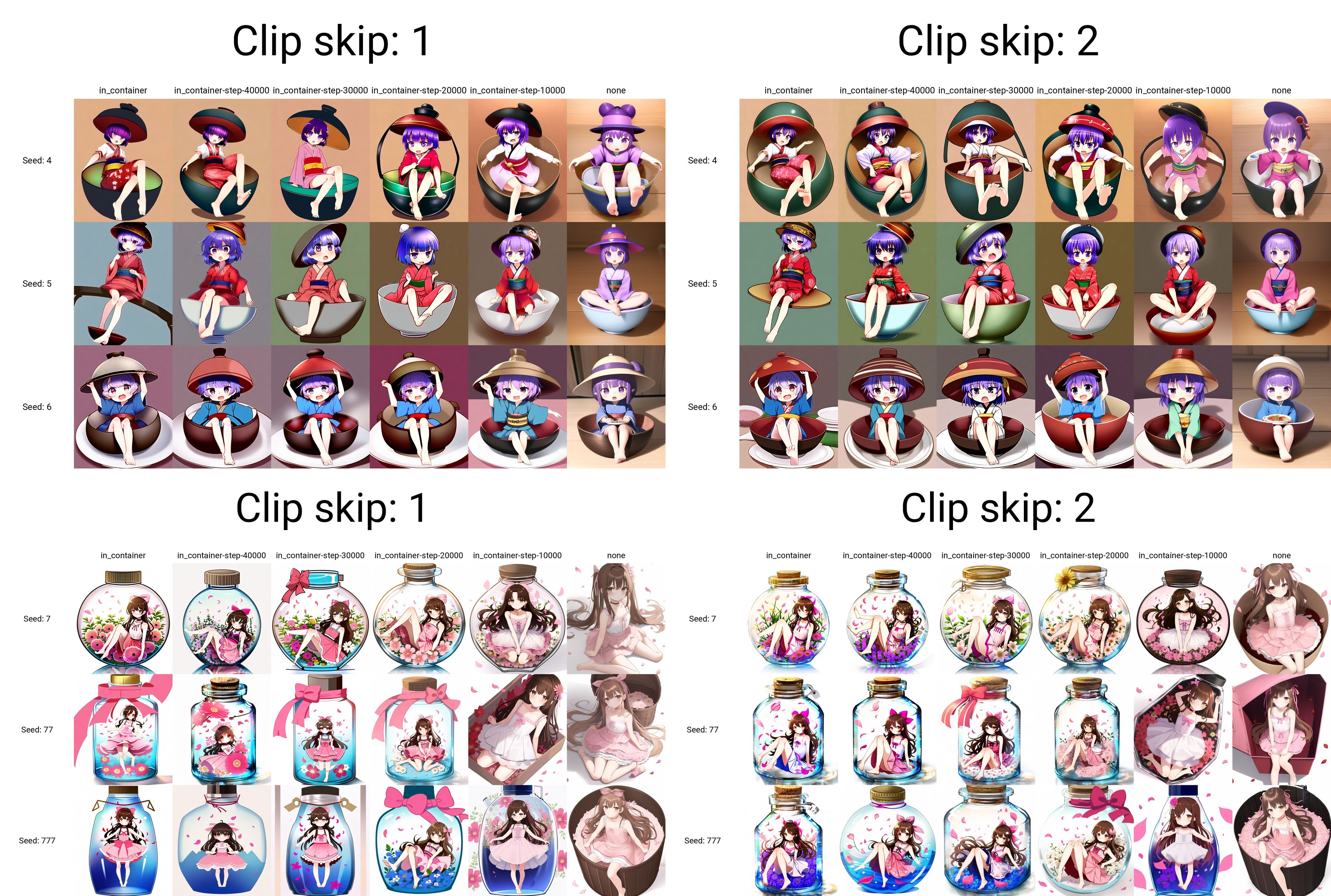
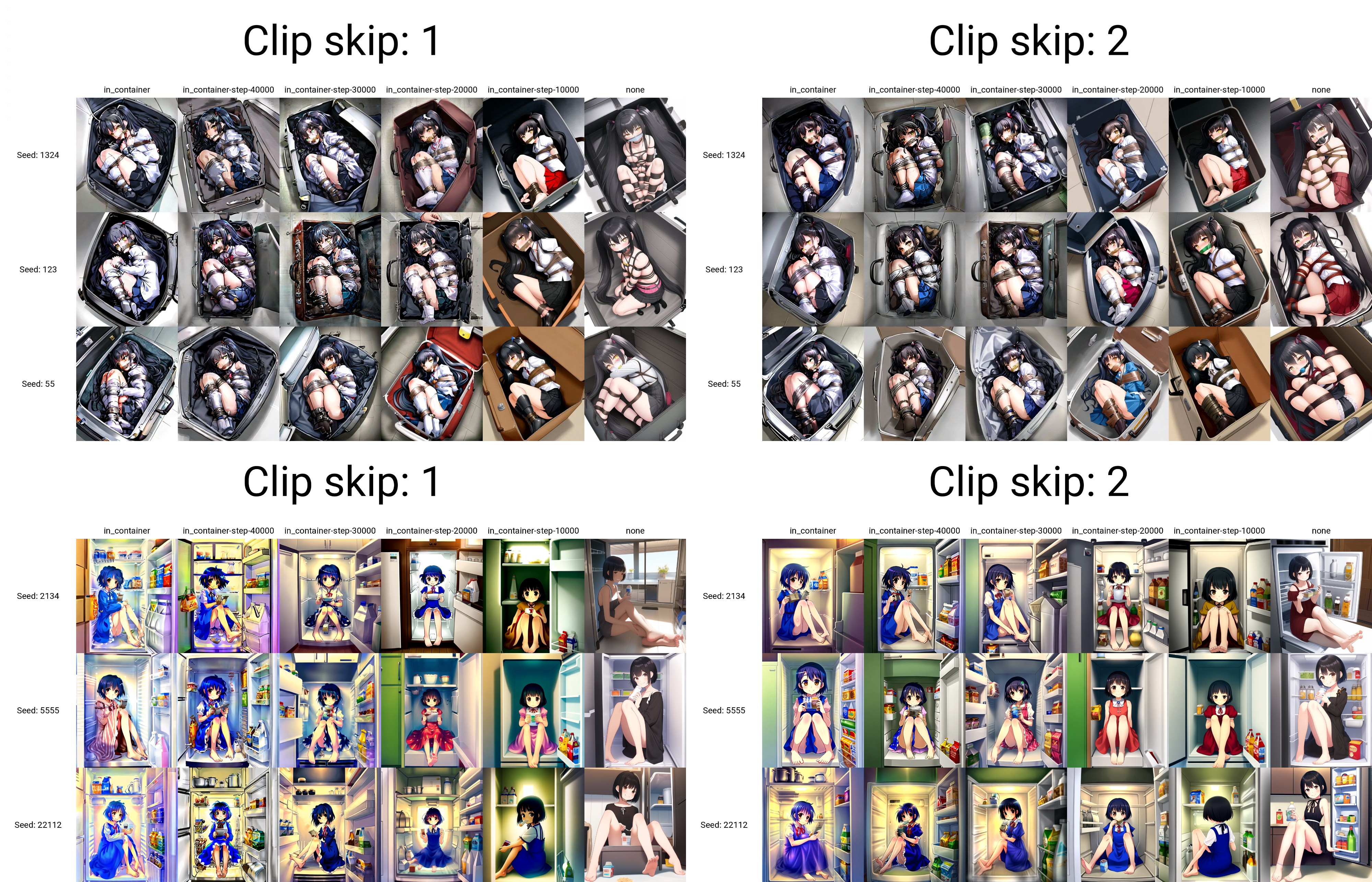
This LoHa is trained on ACertainy with clip skip 1 (but you can use both clip skip 1 and 2; see the the last two example images), and chances are it may not work correctly if you use a model that is far away
In face of this issue, here are some tips for the use of this lora
One common strategy is to lower the weight of lora. While this might reduce some weird artifacts, the success rate of getting the concept right also decreases.
You can first generate some images on ACertainty with txt2img, and then you use img2img on another model. This is what I did with the refrigerator image. You probably still need to lower lora weight in the second stage.
What I do personally is to use some merge that is close to ACertainty. This is done through add difference merge with other model: AC+w(model1-model2)
Do you really need this lora?
In fact, many of these concepts can already be generated directly with the popular models. This is for example the case for 'in cup', 'in bowl', and 'in box'.
Moreover, there are several existing loras on civitai for similar things, and they may suit better your need depending on what you want to achieve (just search in box or in container/in-container).
However, for some other concepts, such as 'in suitcase' or 'in bag', it may be much easier with this lora, unless you are very good at prompting and know how to achieve it directly on your model. Apparently, the effect of the lora on each model is different, so the only way to see whether it makes a difference is to try is yourself.
More details on each sub-concepts
General advice: When you want to put a person in a small thing, adding chibi, mini person, minigirl could help. Fetal position is another tag that could be relevant in general.
'In container' is a general tag that you can, and probably should always put
'In suitcase', 'in bag', 'in closet', 'in bottle', 'in refrigerator', and 'in basket' seem to work the best and improve over what the base model know.
For 'in box', 'in bucket', 'in bowl', and 'in cup', it is more difficult to say whether using this lora really makes a difference, as most model can already do them.
'In trash can' works quite well but it is overfitted on Miyu from blue archive.
'In trunk' works but is overfitted and it never knows the right size of a human compared to a car.
'In locker', 'in sack', and 'in cage' are more difficult to played with we hardly get good results